홈페이지 : http://www.olliw.eu/storm32bgc-wiki/
메뉴얼 : http://www.olliw.eu/storm32bgc-wiki/Manuals_and_Tutorials
■ Storm32 BGC (MOSFET VERSION)
board version: v1.1
board color: blue
motor drivers in DFN packages: yes
on-board MPU: yes
on-board bluetooth module: no
I2C plug type: picoblade (1.25mm JST)
I2C#2 plug type: picoblade (1.25mm JST)
pin headers: no
Gimbal Motor : GM2208-80 / 80KV / 12N14P
(http://www.olliw.eu/storm32bgc-wiki/Docu_for_witespy_board%28s%29)
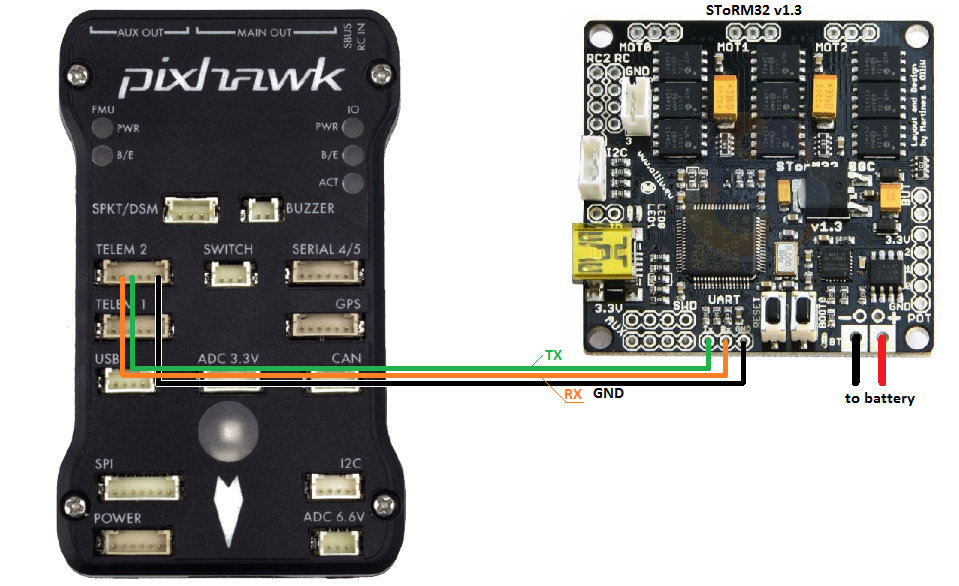
■ STorM32 Pixhawk
http://ardupilot.org/copter/docs/common-storm32-gimbal.html
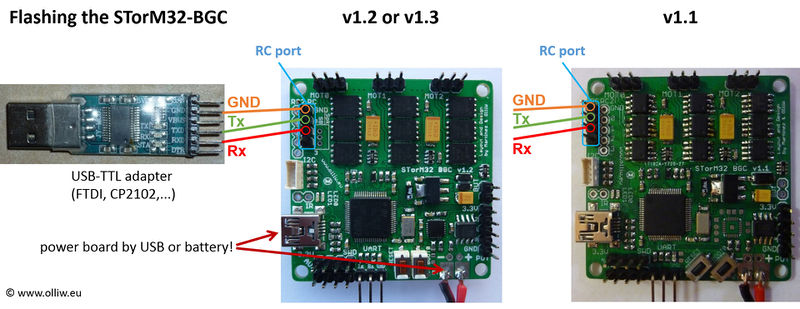
■ How to Flash Firmware
http://www.olliw.eu/storm32bgc-wiki/How_to_flash_firmware
알리산 STorM32보드는 기본적으로 펌웨어가 들어있지 않아 플래싱 작업을 해주어야 한다.
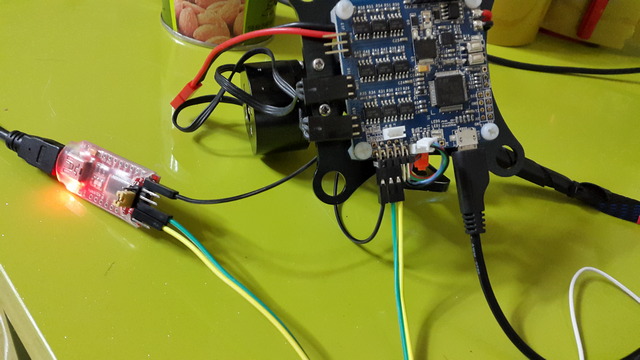
1. STorM32보드를 FTDI 와 위처럼 연결한다.
2. USB 케이블을 꼽는다. (USB는 전원 공급용)
3. 아래와 같이 보드에 있는 버튼을 조작하여 부트로더 모드로 변경한다 (모든 LED off 됨)

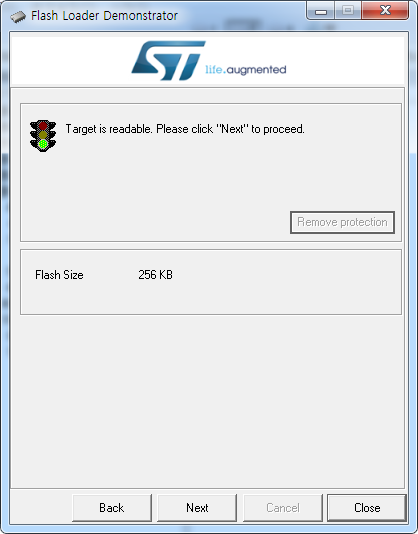
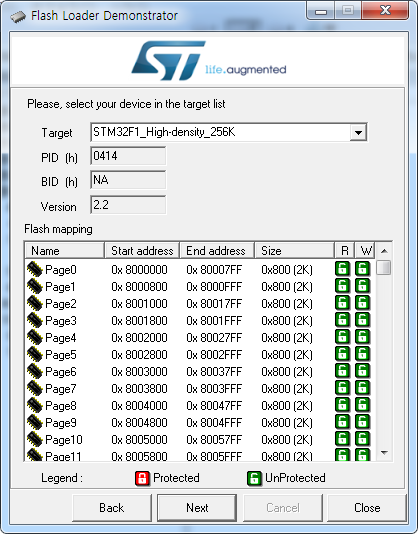
4.아래의 순서로 펌웨어 플래싱을 진행한다.
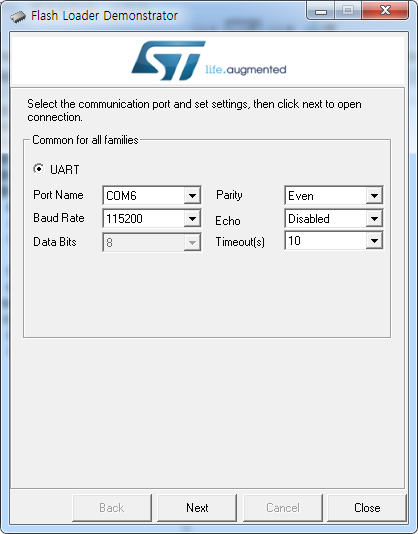
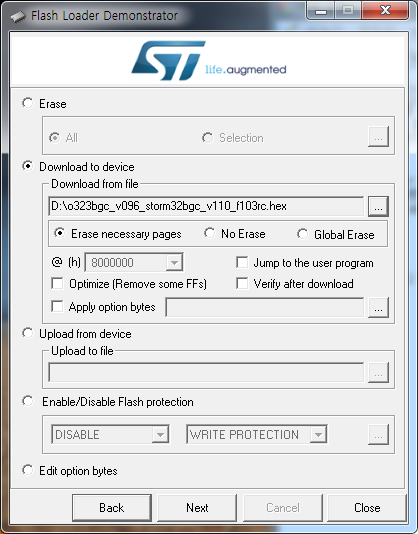
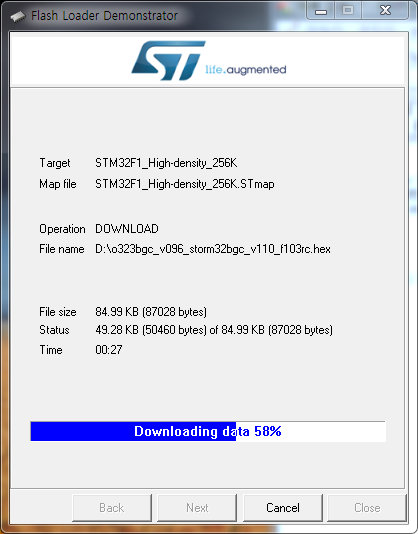
5.NT 버전이 아니니 펌웨어 파일은 "o323bgc_v096_storm32bgc_v110_f103rc.hex" 를 받아 설치한다.
■ STorM32 Configuration & Calibration
1. USB 연결
2. OlliW's o323BGCTool 실행
3. "Calibration Acc"→"Run 1 Point Calibration"
보드의 수평을 유지한다...
"Calibration Acc"→"Imu: Imu2"→"Run 1 Point Calibration"→캘리브레이션...→"Store Calibration"
4. 센서를 원하는 자리에 붙이고 수평을 유지한다. (배터리는 장착하지 않은 상태)
"Calibration Acc"→"Imu: Imu"→"Run 1 Point Calibration"→캘리브레이션...→"Store Calibration"
5. "Global Configuration"→"Configure Gimbal Tool"
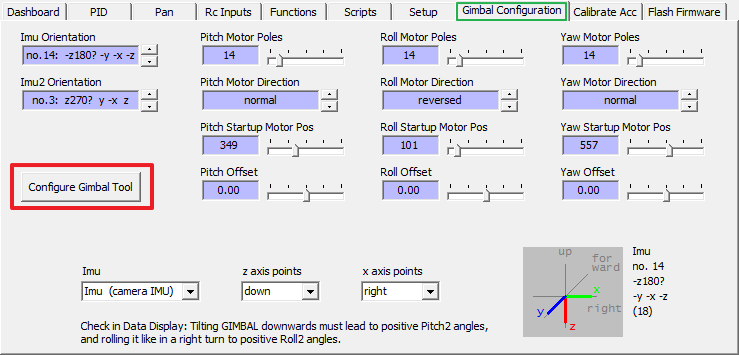
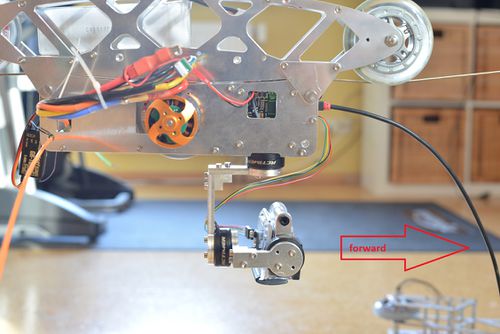
김블을 드론기체에 카메라와 함께 완전히 장착하고, 툴 실행 후에 배터리도 연결한다. (카메라 렌즈가 나와 정면으로 마주보고 있는 상태)
만일 2 Axis면 오른쪽에 "Yaw Motor Position"을 끈다.
Step 1 : IMU 캘리브레이션...
- 첫번째 - "Please level the CAMERA roughly by hand (should be within +-15)" 메세지가 나오면 카메라를 정위치 시켜 손으로 잡고 IMU 캘리브레이션을 실행한다.
- 두번째 - "Reading imu x orientation(x)... Please wait!" 메세지가 나오면 드론을 들어 꼬리가 들리게 45도 정도 앞으로 기울인다. (틸팅)
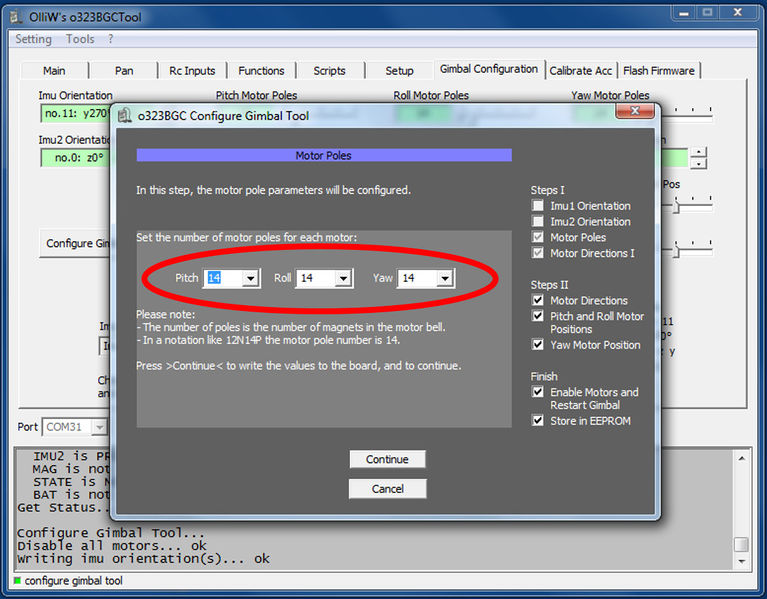
Step 2 : 모터
맨 위에 "In this step, the gimbal will be prepared and restated." 라는 메세지가 보이면 김블의 배터리를 연결한다.
Step by Step으로 진행하며, 아래의 모터폴(통돌이 모터의 통에 붙은 자석 수) 입력은 정확하게 한다.
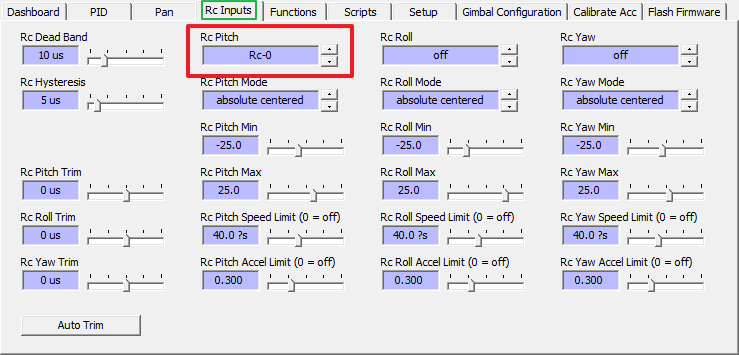
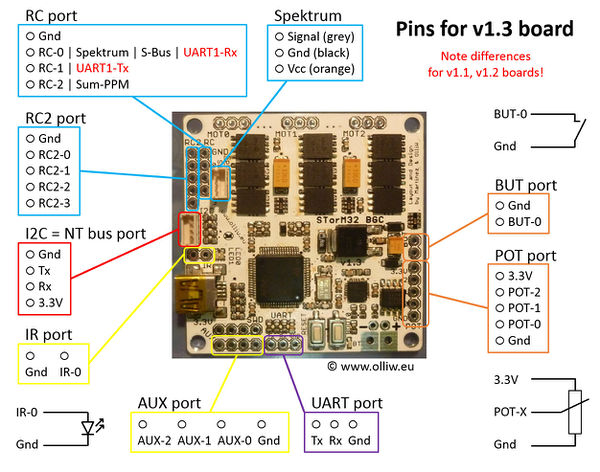
6. RC 입력 셋팅
RC 입력을 아래와 같이 셋팅해 준다.
7..아랫부분의 "Write+Store"를 체크하고 저장한다.
![]()
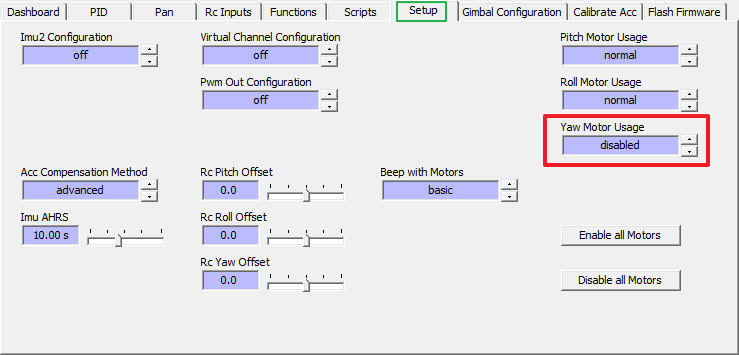
※ 2축 김블은 아래를 설정해 준다. (IMU#2 사용불가)
Setup→Imu2 Configuration : off
Setup→Yaw Motor Usage : disabled
■ 6 Point 캘리브레이션
http://www.olliw.eu/storm32bgc-wiki/Calibration
■ 하드웨어 셋업
http://www.olliw.eu/storm32bgc-wiki/Getting_Started#Hardware_Setup
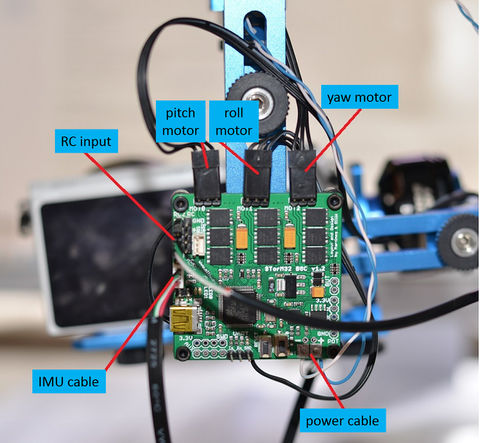
■ 관련 사진
■ Storm32 NT란...
I2C 를 이용하지 않고, NT 버스라는, 그냥 시리얼 통신에 프로토콜 조금 바꾼것을 이용하기 때문에 통신에러가 잘 발생하지 않고, 발생하더라도 쉽게 복구를 한다고 합니다. I2C는 에러가 나면 바로 김블이 죽어버리지요. 이걸 사용하면 보통은 I2C에러로 인하여 사용하지 못하는 할로우 모터를 사용할 수 있기 때문에 선을 모두 안으로 숨기는 것이 가능합니다.