출처 : http://cafe.naver.com/multiwiiclub/6049
Measuring Vibration
바람직한 자세유지와 Loiter 비행의 수행을 위해서는 진동 수치를 낮추는 것이 중요합니다.
아래 설명은 어떻게 진동치를 측정하는지 보여줍니다. 만약 이것들 중 허용범위를 벗어났을 경우 이에 대한 조언은 Vibration Damping page 를 참조 하십시오.
진동수치가 허용치 안에 있는지를 확인하는 다음 절차를 따르십시오.:
APM/PX4를 mission planner에 연결합니다.
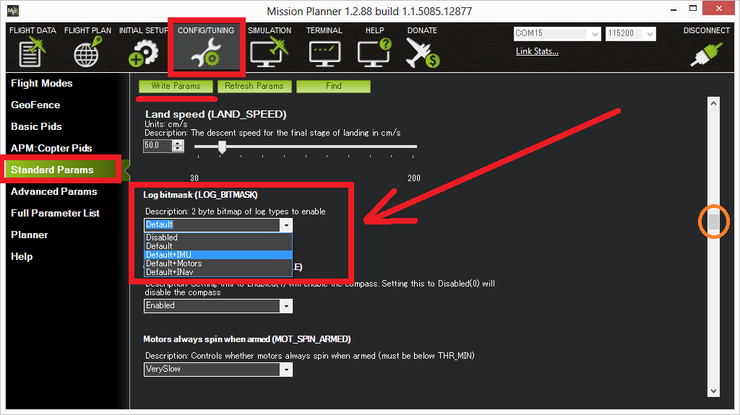
CONFIG/TUNING >Standard Params로 가서 Logbitmask 부분을 펼쳐 Default+IMU를
선택해줍니다.
"Write Params" 버튼을 눌러 설정을 저장합니다.
Stabilize 모드로 비행을 하며 고도유지를 시도합니다. (완전한 정지나 고도유지를 필요로 하는 것은 아닙니다.)
베터리 연결을 해제하고, APM/PX4 과 mission planner를 다시 연결합니다.
Terminal screen을 이용하여 마지막 dataflash log를 다운로드 합니다.
이 과정은 다음 절차를 따르십시오.
첫 번째 그림은 원문에 따라 보여 드립니다.
뭘 하라는지 도대체 모르겠습니다.
그래서 이 부분은 다시 설명합니다.
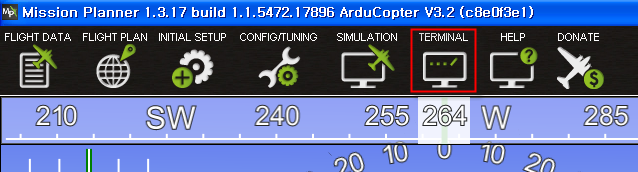
MavLink가 연결 된 상태에서 TERMINAL 메뉴를 선택합니다.
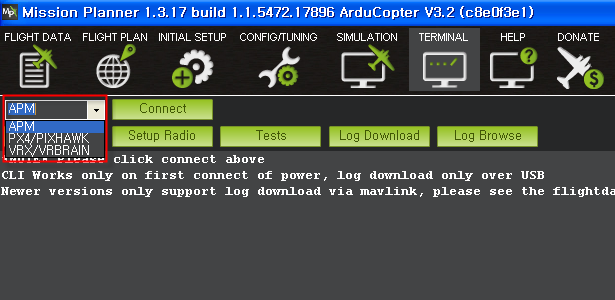
좌측 상단에서 연결된 FC의 종류를 선택합니다. (저의 경우는 PX4/PIXHAWK)
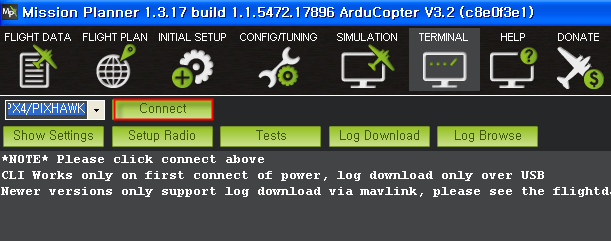
Connect 합니다.
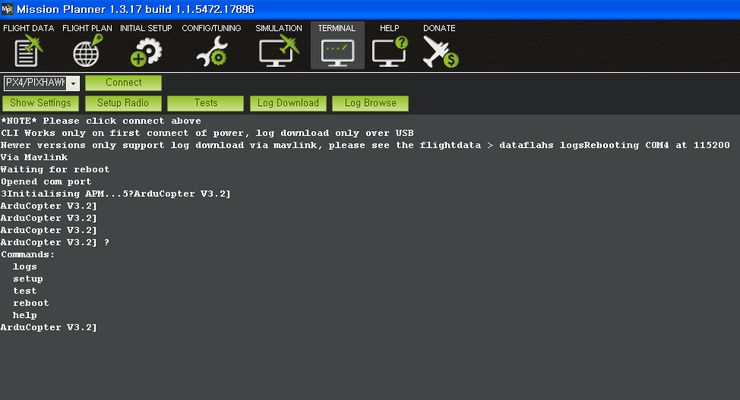
연결이 되었네요. 만약 이때 이상한 문자들(기계어) 나열 된다면 뭔가 잘 못 된 것입니다.
다시 과정을 반복 하십시오.
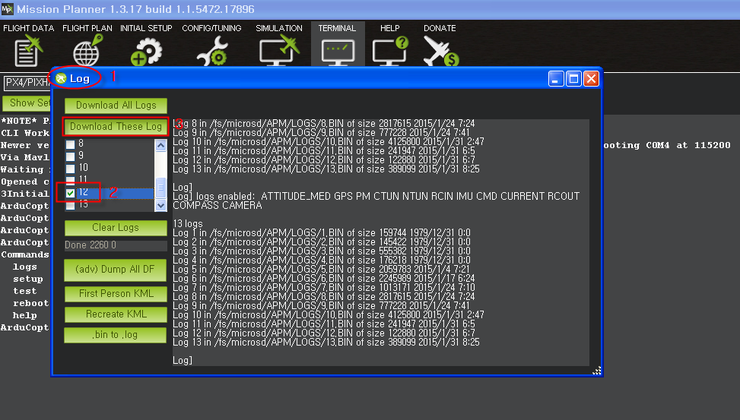
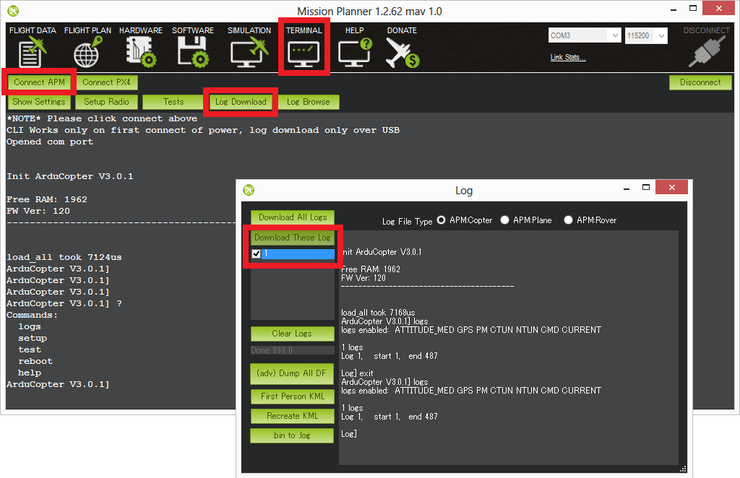
1. 로그창이 뜹니다.
2. 마지막(혹은 로드하고 싶은) 로그를 선택합니다. (저의 경우 사고 당시의 12번 로그입니다.)
3. Download These Log를 클릭합니다.
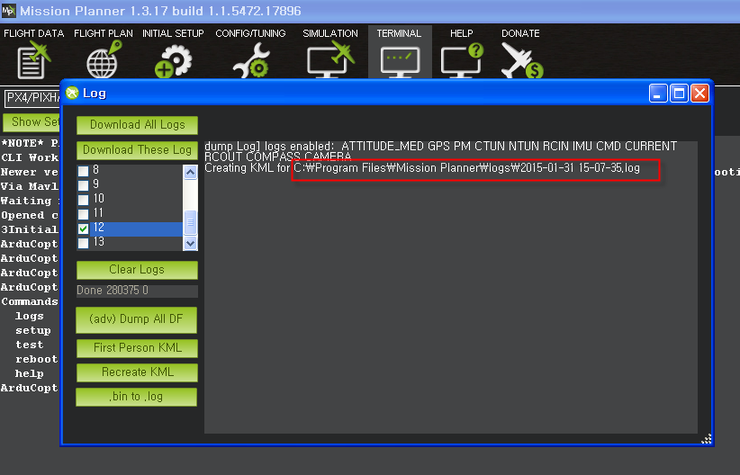
표시된 위치에 해당 로그( 저의 경우 2015-01-31 15-07-35.log) 파일이 다운로드 되었음을 보여줍니다.
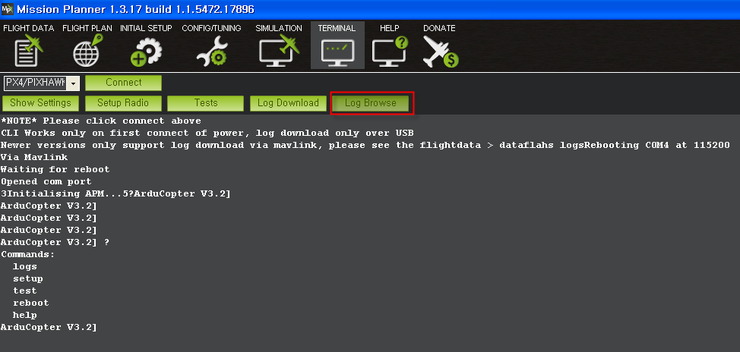
Log Browse 버튼을 클릭합니다.
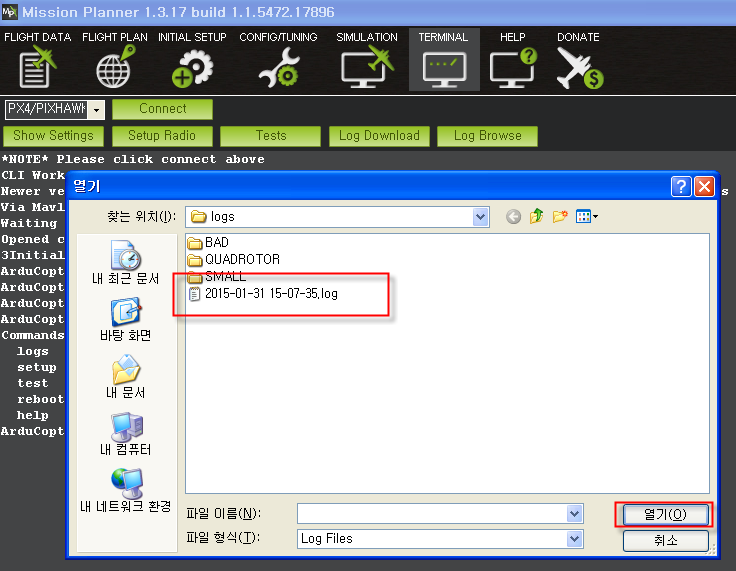
로그 파일 선택창이 뜹니다.
여기서 다운로드 된 로그 파일을 선택하고 열기를 합니다.
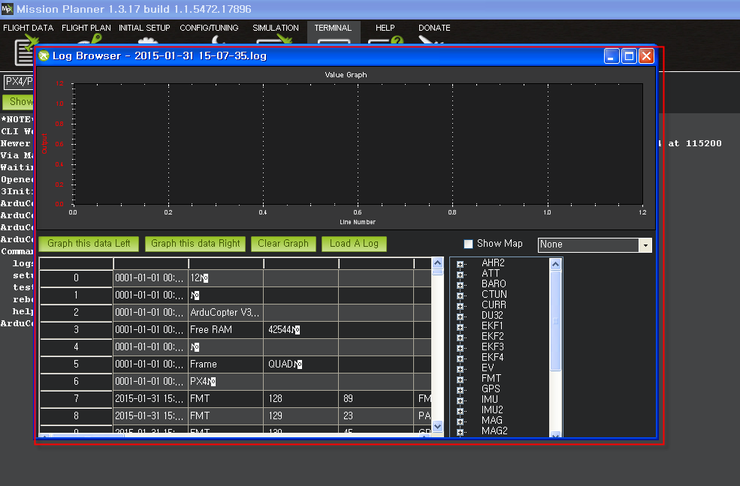
Log Browser 창이 뜹니다.
우측 하단에 주목하십시오.
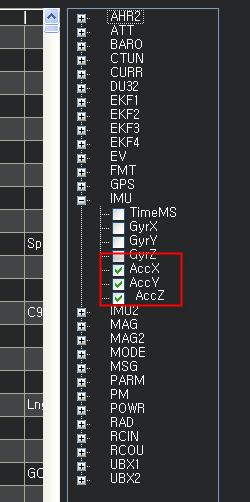
IMU 펼치고 Acc X, Acc Y, Acc Z 체크합니다.
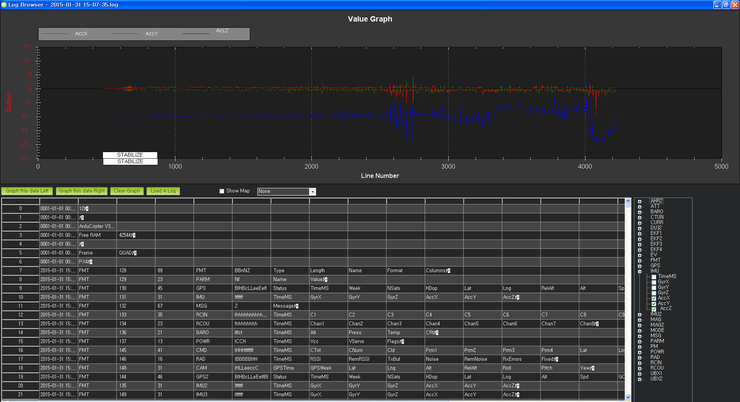
상단에 그래프가 보입니다.
이제 진동수치를 눈으로 확인합니다.
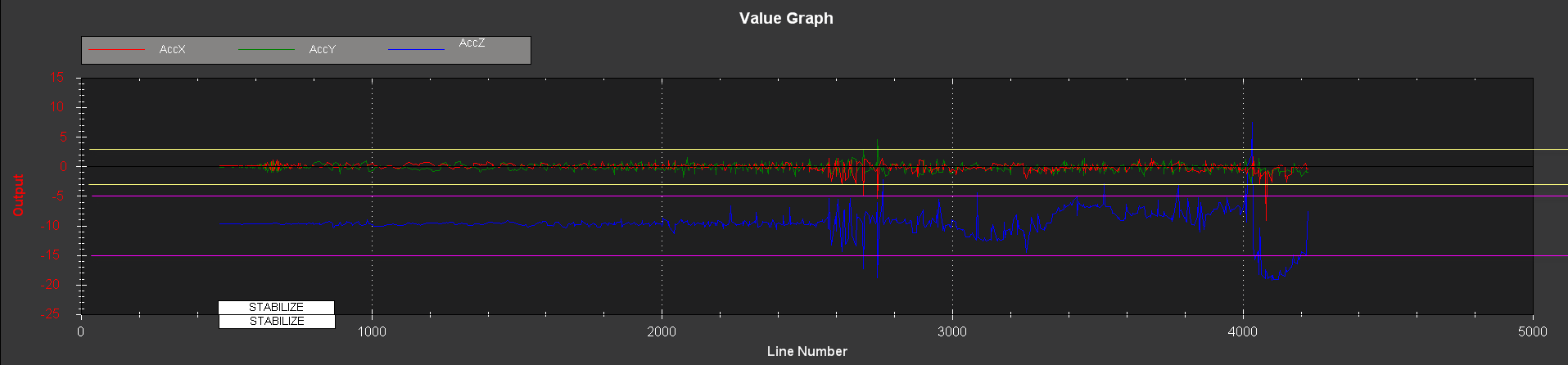
노란색 범위(X,Y)와 보라색 범위(Z)를 잘 살펴보십시오.
AccX와 AccY의 진동값이 -3 에서 +3 사이에 있는지 확인합니다.
AccZ의 허용 범위는 -15에서 -5입니다. 만약 이 값이 한계치에 너무 근접하거나 넘어서면 Vibration Dampening page 의 해결책을 참고 하십시오.
위 과정이 모두 끝나면 Mission Planner의 standard parameters로 가서(아마도 "Connect" 버튼을 다시 눌러야할 겁니다.) Log Bitmask를 "Default"로 해줍니다.
꼭 필요하지 않는 로그를 만드는 것은 불필요한 일이며, APM logging은 CPU의 중요한 자원을 필요로 하므로 이 일은 매우 중요합니다.
첨부
마지막으로 사고 당시의 로그 파일을 보여 드립니다.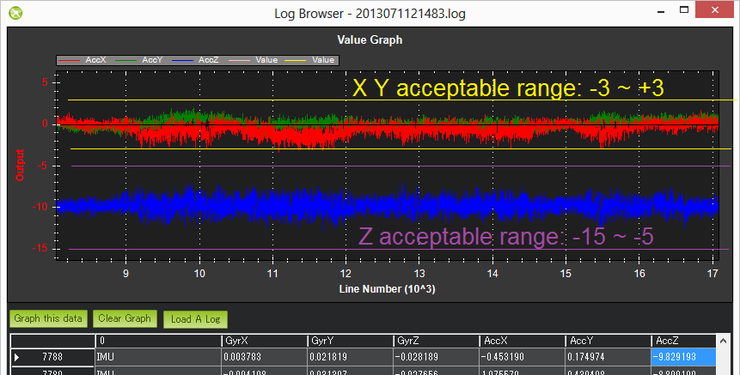
클릭하면 크게 확대하여 보실 수 있습니다.
노란색 범위(X,Y)와 보라색 범위(Z)를 잘 살펴보십시오.
지면과 기체가 수평이 아닌 수직을 이룬후 추락할 당시의 로그 분석입니다.