비행콘트롤러는 진동에 민감합니다. 가속도계가 기체의 위치를 측정할 때 사용되는데, (기압계 및 GPS 도 함께) 진동이 크게 되면 정확한 위치를 기반으로 하는 모드의 성능이 떨어지게 됩니다. 진동은 모든 종류의 기체에 영향을 미치지만, 그중에서도 Copter가 가장 심각하게 발생합니다. 또한 AltHold, Loiter, Guided, Postion, Auto 등의 모드에 영향을 많이 미칩니다.
진동 수준 체크방법
우선 몇분 정도 이상 비행한 데이타가 필요합니다. 비행후, dataflash 에 들어 있는 로그를 다운로드 받아야 하는데, 여러가지 방법이 있지만, 그냥 Pixhawk의 MicroSD 카드를 PC에 꽂아서 복사하는 게 가장 간편합니다.
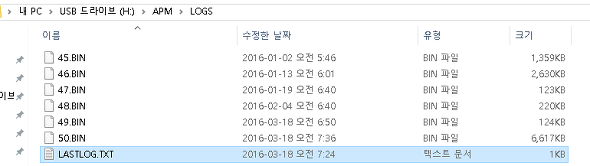
이중 맨 마지막 파일 (50.BIN)이 최종 비행에서 기록된 로그입니다. 이 파일을 아래의 위치에 복사해 줍니다. (로그파일 기본 저장장소임. 다른 곳도 무방함)
...\Mission Planner\logs\QUADROTOR\1
FLIGHT DATA 화면으로 들어가서 아래 DataFlash Logs를 클릭하고, PX4 .Bin to .Log 를 누르면 이 파일(.BIN)이 비행 로그(.LOG) 형식으로 변환됩니다.
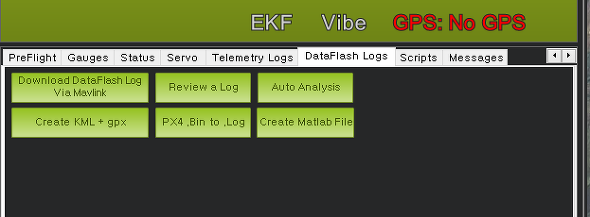
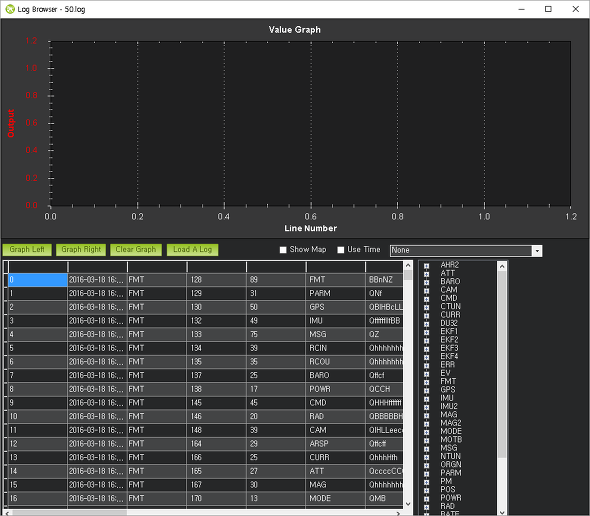
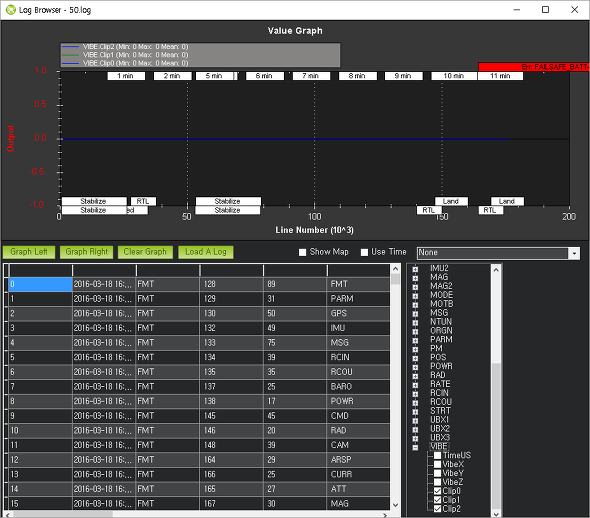
그 다음 [Review a Log]를 누르면 다음과 같은 화면이 뜨게 됩니다.
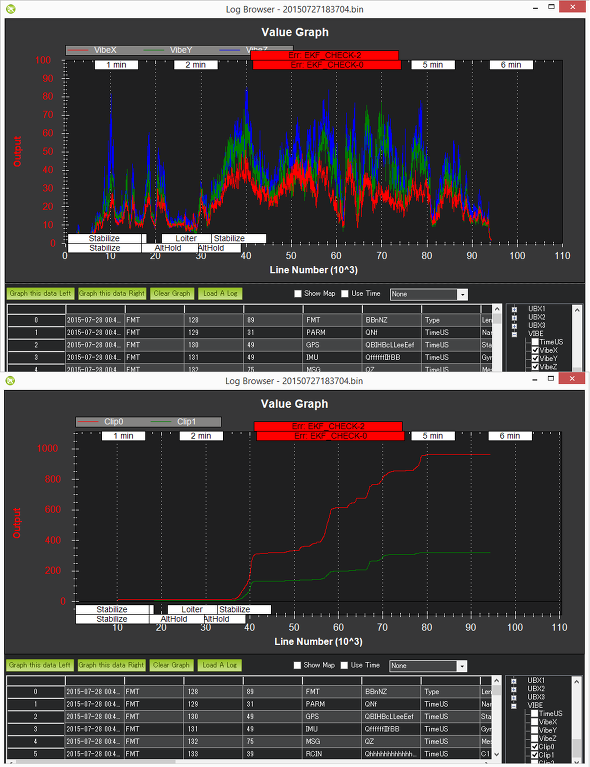
진동을 분석하기 위해서는 오른쪽 아래에 있는 항목 리스트에서 VIBE 를 확장시키고 Vibe_X, Vibe_Y, Vibe_Z를 선택해 줍니다. 선택할 때마다 해당 데이터가 그래프로 표시됩니다.

위 그림은 제 시험비행에서 사용한 데이터입니다. 이 그림에서 Vibe_X(빨강), Vibe_Y(초록)는 작은 값이나, Vibe_Z(파랑)은 값이 큼을 알 수 있습니다. 대략적으로 평균이 15 m/s/s 정도이고 최대 30 내외인데, 이 정도는 허용 가능한 정도라고 합니다. (최대값이 60 m/s/s 를 초과하면 안됨)
그 다음 CLIP0, CLIP1, CLIP2를 클릭해서 그래프를 그려봅니다. 이 값들은 가속도계 중 하나가 최대값(16G)에 도달하면 약간씩 누적 증가하게 되는 값입니다. 비행중 0을 유지하는 게 가장 좋으나, 100이하라면 괜찮음. 저의 경우에는 아래에서 보는 것과 같이 3개 모두 0을 유지했습니다.
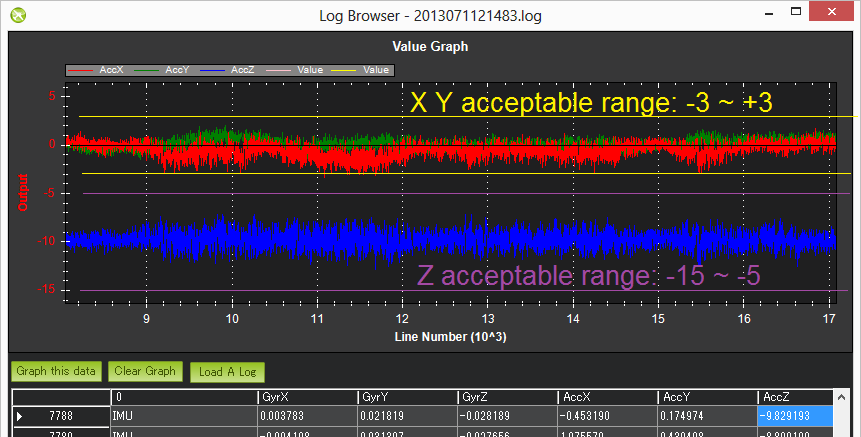
AC3.3 이전 버전에서는 IMU 값을 본다.
AccX,Accy는 -3 ~ +3이 정상수치, AccZ는 -15~ -5가 정상수치임.
====
아래는 진동에 문제가 있는 경우 볼 수 있는 그래프입니다.(Copter 문서에서 가져온 그림입니다.) 이러한 경우에는 별도의 Damping 조치가 필요합니다.